Abstract
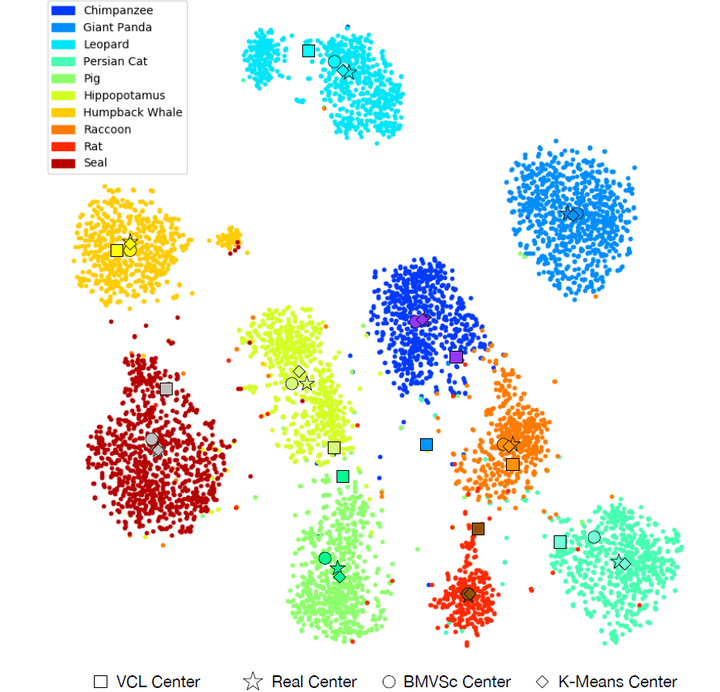
To recognize objects of the unseen classes, most existing Zero-Shot Learning(ZSL) methods first learn a compatible projection function between the common semantic space and the visual space based on the data of source seen classes, then directly apply it to the target unseen classes. However, in real scenarios, the data distribution between the source and target domain might not match well, thus causing the well-known \textbf{domain shift} problem. Based on the observation that visual features of test instances can be separated into different clusters, we propose a new visual structure constraint on class centers for transductive ZSL, to improve the generality of the projection function (i.e. alleviate the above domain shift problem). Specifically, three different strategies (symmetric Chamfer-distance, Bipartite matching distance, and Wasserstein distance) are adopted to align the projected unseen semantic centers and visual cluster centers of test instances. We also propose a new training strategy to handle the real cases where many unrelated images exist in the test dataset, which is not considered in previous methods. Experiments on many widely used datasets demonstrate that the proposed visual structure constraint can bring substantial performance gain consistently and achieve state-of-the-art results. The source code is available at \url{this https URL}.
Please view our project page to learn more.
Xingguang Yan
Ph.D. Student
My research interests include 3D reconstruction & completion, 3D generative models, shape analysis, e.t.c.